Instance Segmentation by Jointly Optimizing Spatial Embeddings and Clustering Bandwidth
Instance Segmentation by Jointly Optimizing Spatial Embeddings and Clustering Bandwidth
Davy Neven Bert De Brabandere Marc Proesmans Luc Van Gool
Abstract
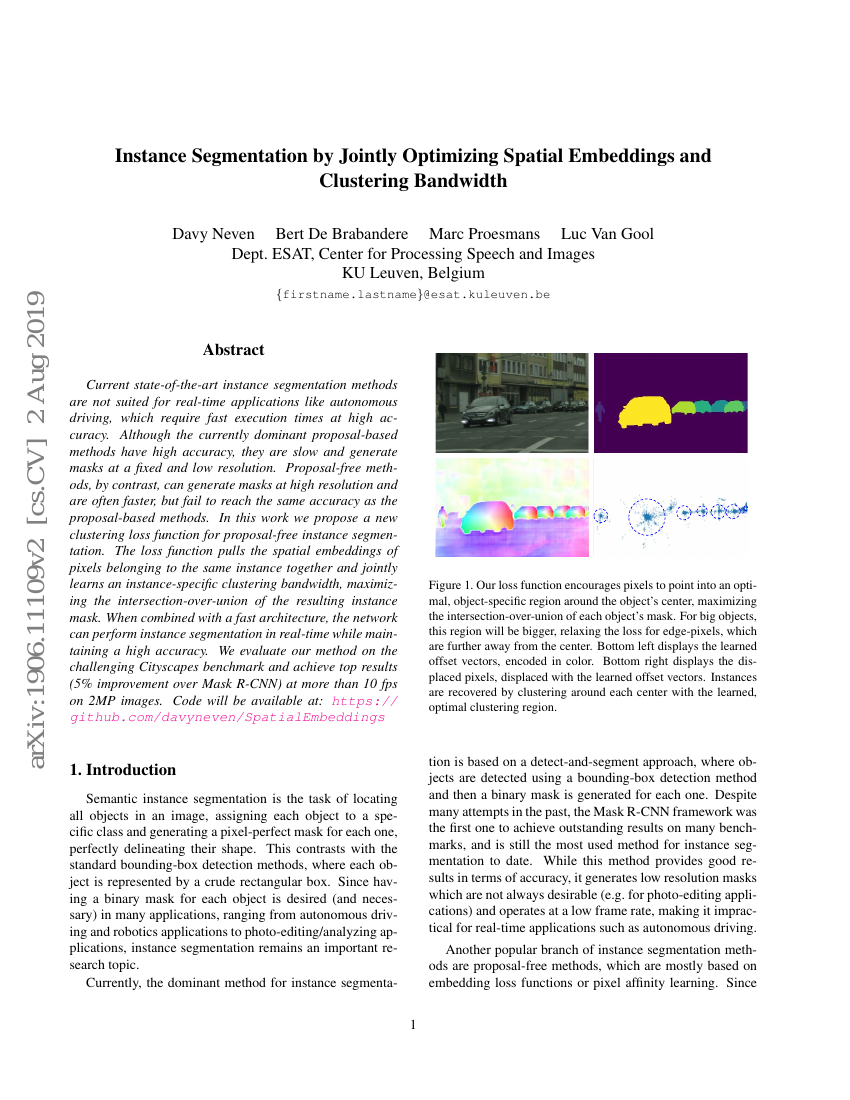
Current state-of-the-art instance segmentation methods are not suited for real-time applications like autonomous driving, which require fast execution times at high accuracy. Although the currently dominant proposal-based methods have high accuracy, they are slow and generate masks at a fixed and low resolution. Proposal-free methods, by contrast, can generate masks at high resolution and are often faster, but fail to reach the same accuracy as the proposal-based methods. In this work we propose a new clustering loss function for proposal-free instance segmentation. The loss function pulls the spatial embeddings of pixels belonging to the same instance together and jointly learns an instance-specific clustering bandwidth, maximizing the intersection-over-union of the resulting instance mask. When combined with a fast architecture, the network can perform instance segmentation in real-time while maintaining a high accuracy. We evaluate our method on the challenging Cityscapes benchmark and achieve top results (5% improvement over Mask R-CNN) at more than 10 fps on 2MP images. Code will be available at https://github.com/davyneven/SpatialEmbeddings .
Code Repositories
Benchmarks
| Benchmark | Methodology | Metrics |
|---|---|---|
| instance-segmentation-on-cityscapes | Learnable Margin | - |
| instance-segmentation-on-cityscapes | Instance Segmentation by Jointly Optimizing Spatial Embeddings and Clustering Bandwidth | - |
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.