Christopher Choy Wei Dong Vladlen Koltun
Abstract
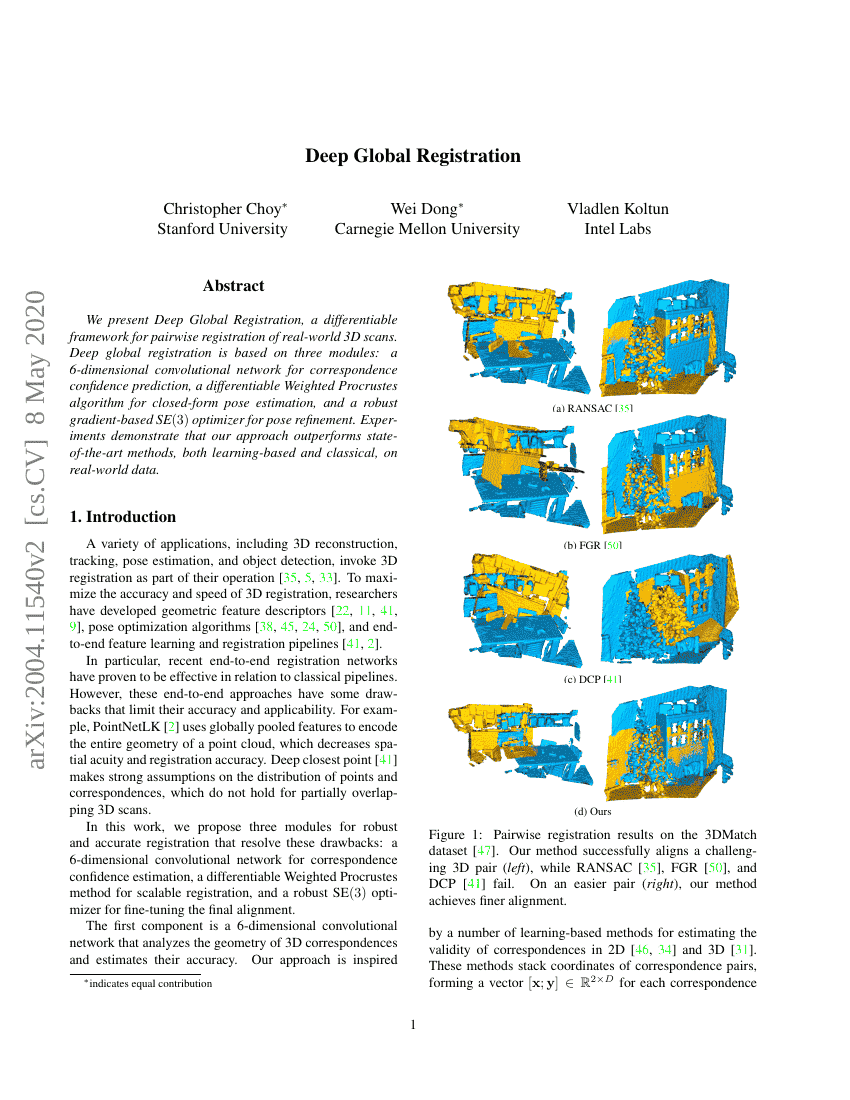
We present Deep Global Registration, a differentiable framework for pairwise registration of real-world 3D scans. Deep global registration is based on three modules: a 6-dimensional convolutional network for correspondence confidence prediction, a differentiable Weighted Procrustes algorithm for closed-form pose estimation, and a robust gradient-based SE(3) optimizer for pose refinement. Experiments demonstrate that our approach outperforms state-of-the-art methods, both learning-based and classical, on real-world data.
Code Repositories
chrischoy/DeepGlobalRegistration
Official
pytorch
chrischoy/FCGF
pytorch
Mentioned in GitHub
Benchmarks
| Benchmark | Methodology | Metrics |
|---|---|---|
| point-cloud-registration-on-3dlomatch-10-30 | DGR (reported in REGTR) | Recall ( correspondence RMSE below 0.2): 48.7 |
| point-cloud-registration-on-3dmatch-at-least-1 | DGR (RE (all), TE(all) are reported in PCAM) | RE (all): 9.5 Recall (0.3m, 15 degrees): 91.3 TE (all): 0.25 |
| point-cloud-registration-on-3dmatch-at-least-2 | DGR (reported in REGTR) | Recall ( correspondence RMSE below 0.2): 85.3 |
| point-cloud-registration-on-kitti-fcgf | DGR (RE (all), TE(all) are reported in PCAM) | RE (all): 1.62 Recall (0.6m, 5 degrees): 96.9 TE (all): 0.34 |
| point-cloud-registration-on-kitti-fcgf | DGR + ICP (RE (all), TE(all) are reported in PCAM) | RE (all): 1.43 Recall (0.6m, 5 degrees): 98.2 TE (all): 0.16 |
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.
AI Co-coding
Ready-to-use GPUs
Best Pricing
Hyper Newsletters
Subscribe to our latest updates
We will deliver the latest updates of the week to your inbox at nine o'clock every Monday morning
Powered by MailChimp