DKM: Dense Kernelized Feature Matching for Geometry Estimation
DKM: Dense Kernelized Feature Matching for Geometry Estimation
Johan Edstedt Ioannis Athanasiadis Mårten Wadenbäck Michael Felsberg
Abstract
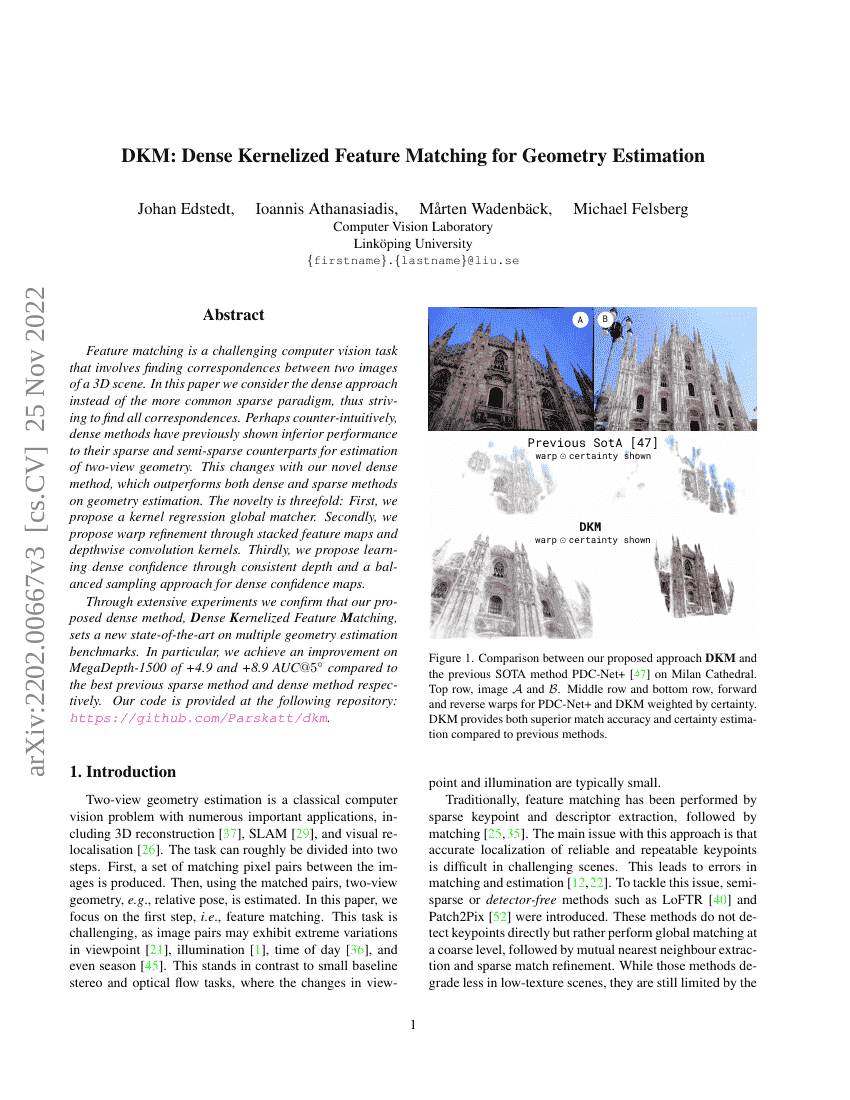
Feature matching is a challenging computer vision task that involves findingcorrespondences between two images of a 3D scene. In this paper we consider thedense approach instead of the more common sparse paradigm, thus striving tofind all correspondences. Perhaps counter-intuitively, dense methods havepreviously shown inferior performance to their sparse and semi-sparsecounterparts for estimation of two-view geometry. This changes with our noveldense method, which outperforms both dense and sparse methods on geometryestimation. The novelty is threefold: First, we propose a kernel regressionglobal matcher. Secondly, we propose warp refinement through stacked featuremaps and depthwise convolution kernels. Thirdly, we propose learning denseconfidence through consistent depth and a balanced sampling approach for denseconfidence maps. Through extensive experiments we confirm that our proposeddense method, \textbf{D}ense \textbf{K}ernelized Feature \textbf{M}atching,sets a new state-of-the-art on multiple geometry estimation benchmarks. Inparticular, we achieve an improvement on MegaDepth-1500 of +4.9 and +8.9AUC@5∘ compared to the best previous sparse method and dense methodrespectively. Our code is provided at https://github.com/Parskatt/dkm
Code Repositories
Benchmarks
| Benchmark | Methodology | Metrics |
|---|---|---|
| image-matching-on-zeb | DKM | Mean AUC@5°: 46.2 |
| pose-estimation-on-inloc | DKM | [email protected],10°: 51.5 [email protected],10°: 75.3 [email protected],10°: 86.9 [email protected],10°: 63.4 [email protected],10°: 82.4 [email protected],10°: 87.8 |
| visual-localization-on-aachen-day-night-v1-1 | DKM |
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.