NIKI: Neural Inverse Kinematics with Invertible Neural Networks for 3D
Human Pose and Shape Estimation
NIKI: Neural Inverse Kinematics with Invertible Neural Networks for 3D Human Pose and Shape Estimation
Jiefeng Li Siyuan Bian Qi Liu Jiasheng Tang Fan Wang Cewu Lu
Abstract
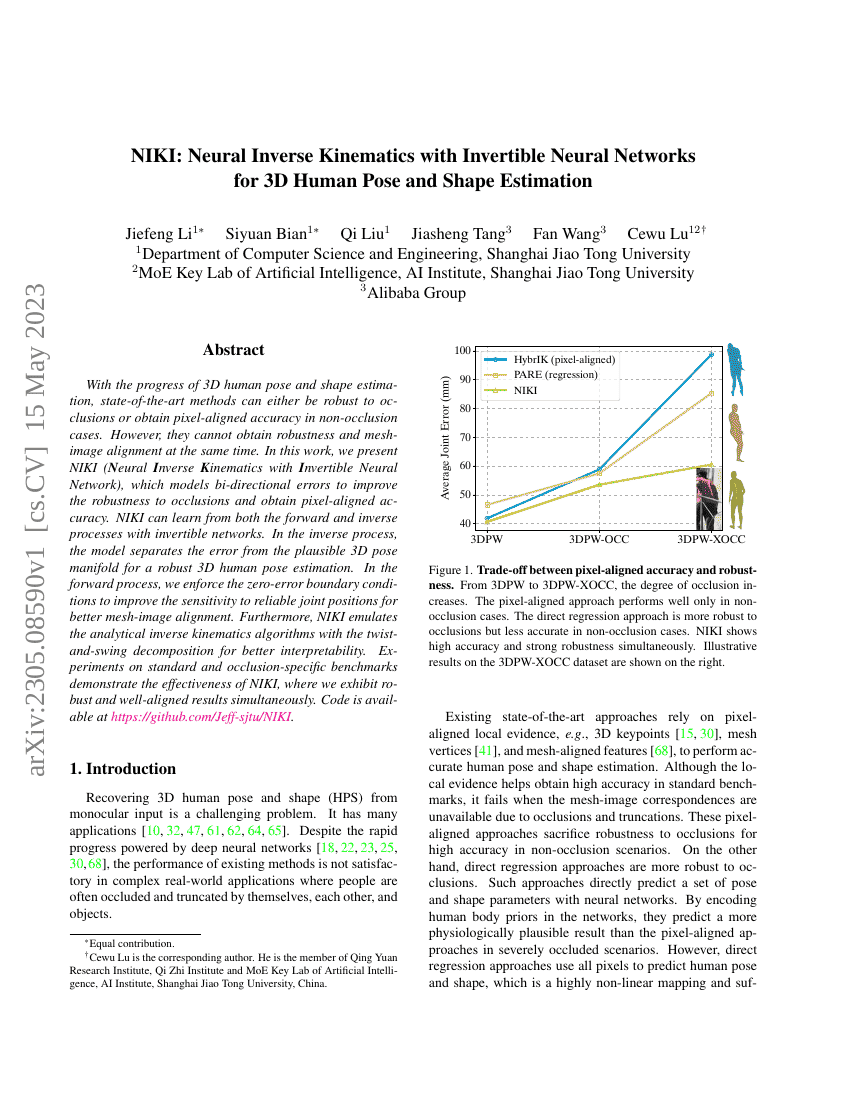
With the progress of 3D human pose and shape estimation, state-of-the-artmethods can either be robust to occlusions or obtain pixel-aligned accuracy innon-occlusion cases. However, they cannot obtain robustness and mesh-imagealignment at the same time. In this work, we present NIKI (Neural InverseKinematics with Invertible Neural Network), which models bi-directional errorsto improve the robustness to occlusions and obtain pixel-aligned accuracy. NIKIcan learn from both the forward and inverse processes with invertible networks.In the inverse process, the model separates the error from the plausible 3Dpose manifold for a robust 3D human pose estimation. In the forward process, weenforce the zero-error boundary conditions to improve the sensitivity toreliable joint positions for better mesh-image alignment. Furthermore, NIKIemulates the analytical inverse kinematics algorithms with the twist-and-swingdecomposition for better interpretability. Experiments on standard andocclusion-specific benchmarks demonstrate the effectiveness of NIKI, where weexhibit robust and well-aligned results simultaneously. Code is available athttps://github.com/Jeff-sjtu/NIKI
Code Repositories
Benchmarks
| Benchmark | Methodology | Metrics |
|---|---|---|
| 3d-human-pose-estimation-on-3dpw | NIKI (Twist-and-Swing) | MPJPE: 71.3 MPVPE: 86.6 PA-MPJPE: 40.6 |
| 3d-human-pose-estimation-on-agora | NIKI (Twist-and-Swing) | B-MPJPE: 67.3 B-MVE: 63.9 B-NMJE: 74 B-NMVE: 70.2 |
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.