Command Palette
Search for a command to run...
Chen Liang-Chieh Papandreou George Schroff Florian Adam Hartwig
摘要
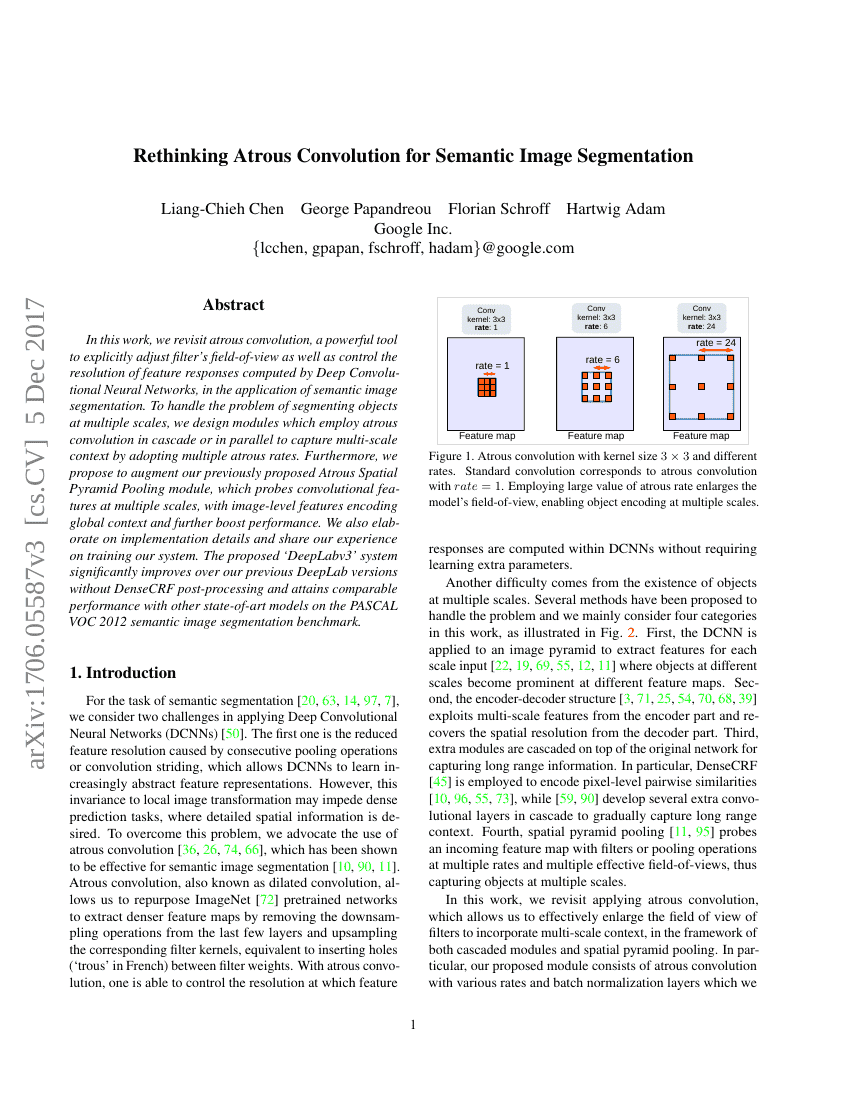
在本工作中,我们重新审视了空洞卷积(atrous convolution)这一强大工具在语义图像分割任务中的应用。空洞卷积能够显式调整卷积核的感受野,同时控制深度卷积神经网络所生成特征响应的分辨率。为应对多尺度目标分割的挑战,我们设计了若干模块,通过级联或并行方式使用空洞卷积,并采用多个空洞率来捕捉多尺度上下文信息。此外,我们提出对先前提出的空洞空间金字塔池化(Atrous Spatial Pyramid Pooling)模块进行增强,引入编码全局上下文信息的图像级特征,进一步提升模型性能。我们还详细阐述了实现细节,并分享了训练该系统过程中积累的经验。所提出的“DeepLabv3”系统在无需使用DenseCRF后处理的情况下,显著优于我们之前的DeepLab版本,并在PASCAL VOC 2012语义图像分割基准测试中达到了与当前其他先进模型相当的性能水平。
代码仓库
giovanniguidi/deeplabV3_Pytorch
pytorch
GitHub 中提及
xahidbuffon/SUIM
GitHub 中提及
udacity/MLND-CN-Capstone-TGSImage
GitHub 中提及
PaddlePaddle/PaddleSeg
paddle
chenmengyang/rename_later
GitHub 中提及
leimao/DeepLab_v3
tf
GitHub 中提及
msminhas93/deeplabv3finetuning
pytorch
GitHub 中提及
pytorch/vision
pytorch
sharifelguindi/DeepLab
tf
GitHub 中提及
Popcorn-sugar/Deep_v2
tf
GitHub 中提及
guglielmocamporese/hands-segmentation-pytorch
pytorch
GitHub 中提及
IRVLab/SUIM-Net
GitHub 中提及
chenxi116/DeepLabv3.pytorch
pytorch
GitHub 中提及
fregu856/deeplabv3
pytorch
GitHub 中提及
stigma0617/VoVNet-DeepLabV3
pytorch
GitHub 中提及
JinyongJeong/DeeplabV3_Apolloscape_and_CityScape
tf
GitHub 中提及
DLWK/EANet
pytorch
GitHub 中提及
giannifranchi/deeplabv3-superpixelmix
pytorch
GitHub 中提及
parachutel/deeplabv3plus_on_Mapillary_Vistas
tf
GitHub 中提及
sthalles/deeplab_v3
tf
GitHub 中提及
pranoy-panda/multi_class_segmentation_deeplabv3
pytorch
GitHub 中提及
IRVLab/SUIM
GitHub 中提及
czarmanu/sentinel_lakeice
tf
GitHub 中提及
dajes/DensePose-TorchScript
pytorch
GitHub 中提及
TheTrveAnthony/no-Green
pytorch
GitHub 中提及
VainF/DeepLabV3Plus-Pytorch
pytorch
GitHub 中提及
BebDong/MXNetSeg
mxnet
GitHub 中提及
lewandofskee/MobileMamba
pytorch
GitHub 中提及
AutomatedAI/deeplab_inference
tf
GitHub 中提及
tensorflow/models
tf
GitHub 中提及
rishizek/tensorflow-deeplab-v3
tf
GitHub 中提及
2023-MindSpore-1/ms-code-170
mindspore
giovanniguidi/deeplabV3-PyTorch
pytorch
GitHub 中提及
kekeller/semantic_soy_deeplabv3plus
tf
GitHub 中提及
DarkGeekMS/Semantic_Segmentation_Models_Keras
tf
GitHub 中提及
Mind23-2/MindCode-39
mindspore
ensta-u2is/deeplabv3plus-muad-pytorch
pytorch
GitHub 中提及
Robinatp/Deeplab_Tensorflow
tf
GitHub 中提及
AutomatedAI/deeplab_segmentation_example
tf
GitHub 中提及
osmr/imgclsmob
mxnet
GitHub 中提及
zhangzjn/emo
pytorch
GitHub 中提及
Syarujianai/deeplab-commented
tf
GitHub 中提及
mathildor/DeepLab-v3
tf
GitHub 中提及
akkaze/cnn-without-any-downsampling
tf
GitHub 中提及
Media-Smart/vedaseg
pytorch
it6aidl/outdoorsegmentation
pytorch
GitHub 中提及
leonardoaraujosantos/seg_atrous
pytorch
GitHub 中提及
kdha0727/cancer-instance-segmentation-from-tissue
pytorch
GitHub 中提及
naver-ai/BlendNeRF
pytorch
GitHub 中提及
Mind23-2/MindCode-33
mindspore
2023-MindSpore-1/ms-code-167
mindspore
GitHub 中提及
jbardelli/Petrographic-Image-Segmentation
tf
GitHub 中提及
heidongxianhau/deeplab2
tf
GitHub 中提及
leimao/DeepLab-V3
tf
GitHub 中提及
NaturalHistoryMuseum/semantic-segmentation
pytorch
GitHub 中提及
xahidbuffon/SVAM-Net
tf
GitHub 中提及
EdwinAlegria/object_semantic_deeplabv3
tf
GitHub 中提及
tensorflow/models/tree/master/research/deeplab
tf
GitHub 中提及
JWuzyk/CudaVisionProject
pytorch
GitHub 中提及
zhangzjn/emov2
pytorch
GitHub 中提及
KPMG-wiseuniv/AI
pytorch
GitHub 中提及
zxleong/GPRNet
GitHub 中提及
samson6460/tf2_Segmentation
tf
GitHub 中提及
基准测试
| 基准 | 方法 | 指标 |
|---|---|---|
| dichotomous-image-segmentation-on-dis-te1 | DeeplabV3+ | E-measure: 0.772 HCE: 234 MAE: 0.102 S-Measure: 0.694 max F-Measure: 0.601 weighted F-measure: 0.506 |
| dichotomous-image-segmentation-on-dis-te2 | DeeplabV3+ | E-measure: 0.813 HCE: 516 MAE: 0.105 S-Measure: 0.729 max F-Measure: 0.681 weighted F-measure: 0.587 |
| dichotomous-image-segmentation-on-dis-te3 | DeeplabV3+ | E-measure: 0.833 HCE: 999 MAE: 0.102 S-Measure: 0.749 max F-Measure: 0.717 weighted F-measure: 0.623 |
| dichotomous-image-segmentation-on-dis-te4 | DeeplabV3+ | E-measure: 0.820 HCE: 3709 MAE: 0.111 S-Measure: 0.744 max F-Measure: 0.715 weighted F-measure: 0.621 |
| dichotomous-image-segmentation-on-dis-vd | DeeplabV3+ | E-measure: 0.796 HCE: 1520 MAE: 0.114 S-Measure: 0.716 max F-Measure: 0.660 weighted F-measure: 0.568 |
| semantic-segmentation-on-cityscapes | DeepLabv3 (ResNet-101, coarse) | Mean IoU (class): 81.3% |
| semantic-segmentation-on-cityscapes-val | DeepLabv3 (Dilated-ResNet-101) | mIoU: 78.5% |
| semantic-segmentation-on-pascal-voc-2012 | DeepLabv3-JFT | Mean IoU: 86.9% |
| semantic-segmentation-on-pascal-voc-2012-val | DeepLabv3-JFT | mIoU: 82.7% |
| semantic-segmentation-on-selma | DeepLabV3 | mIoU: 70.7 |