Command Palette
Search for a command to run...
摘要
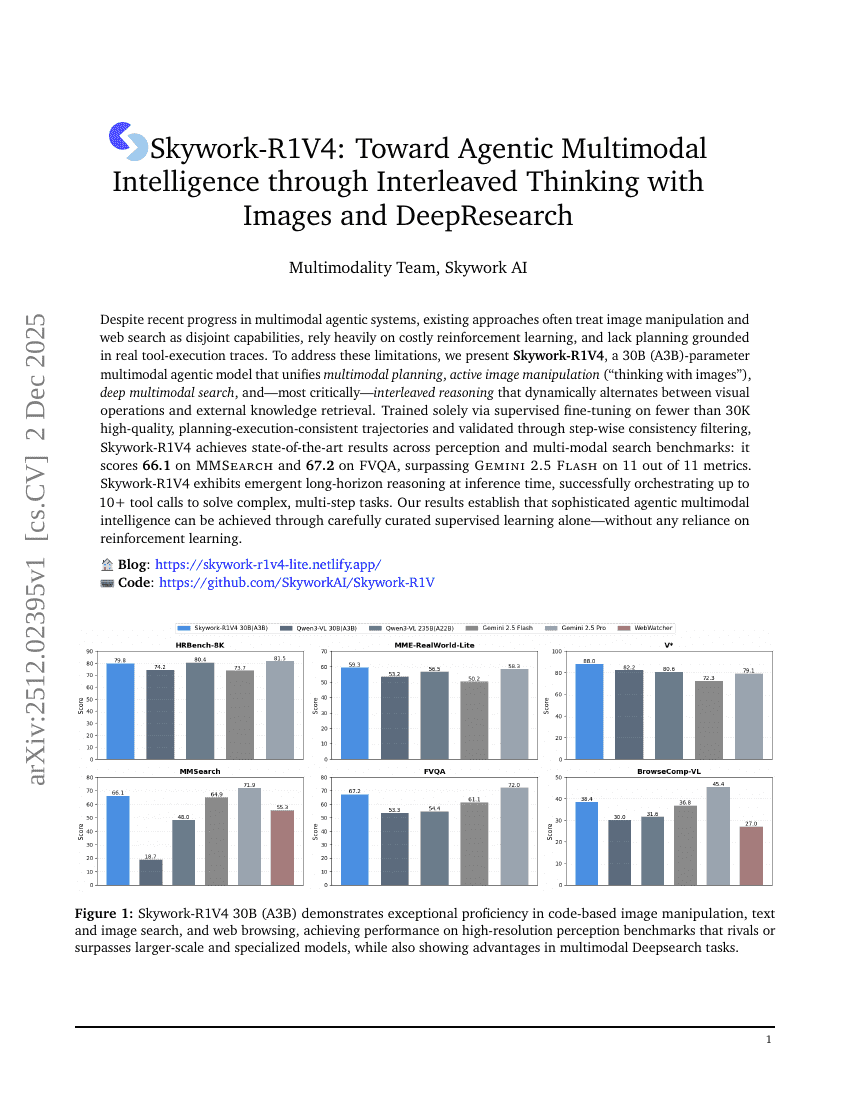
尽管多模态智能体系统近年来取得了显著进展,现有方法通常将图像操作与网络搜索视为相互独立的能力,严重依赖昂贵的强化学习训练,并且缺乏基于真实工具执行轨迹的规划能力。为解决上述局限,我们提出Skywork-R1V4——一个拥有300亿(A3B)参数的多模态智能体模型,该模型首次实现了多模态规划、主动图像操作(“以图像思考”)、深度多模态搜索,以及最关键的一点:动态交织的推理机制,能够在视觉操作与外部知识检索之间进行实时交替。Skywork-R1V4仅通过在少于3万条高质量、规划与执行一致的轨迹上进行监督微调训练,并结合逐步一致性过滤进行验证,便在感知与多模态搜索基准测试中取得了当前最优性能:在MMSearch上达到66.1分,在FVQA上达到67.2分,全面超越Gemini 2.5 Flash在全部11项指标上的表现。在推理阶段,Skywork-R1V4展现出涌现的长程推理能力,能够成功协调超过10次工具调用,完成复杂且多步骤的任务。我们的实验结果表明,仅通过精心构建的监督学习即可实现高度复杂的多模态智能体智能,无需依赖任何强化学习机制。