Command Palette
Search for a command to run...
Look Before Acting: Enhancing Vision Foundation Representations for Vision-Language-Action Models
Look Before Acting: Enhancing Vision Foundation Representations for Vision-Language-Action Models
Abstract
Vision-Language-Action (VLA) models have recently emerged as a promising paradigm for robotic manipulation, in which reliable action prediction critically depends on accurately interpreting and integrating visual observations conditioned on language instructions. Although recent works have sought to enhance the visual capabilities of VLA models, most approaches treat the LLM backbone as a black box, providing limited insight into how visual information is grounded into action generation. Therefore, we perform a systematic analysis of multiple VLA models across different action-generation paradigms and observe that sensitivity to visual tokens progressively decreases in deeper layers during action generation. Motivated by this observation, we propose DeepVision-VLA, built on a Vision-Language Mixture-of-Transformers (VL-MoT) framework. This framework enables shared attention between the vision foundation model and the VLA backbone, injecting multi-level visual features from the vision expert into deeper layers of the VLA backbone to enhance visual representations for precise and complex manipulation. In addition, we introduce Action-Guided Visual Pruning (AGVP), which leverages shallow-layer attention to prune irrelevant visual tokens while preserving task-relevant ones, reinforcing critical visual cues for manipulation with minimal computational overhead. DeepVision-VLA outperforms prior state-of-the-art methods by 9.0% and 7.5% on simulated and real-world tasks, respectively, providing new insights for the design of visually enhanced VLA models.
One-sentence Summary
Researchers from Peking University, Simplexity Robotics, and The Chinese University of Hong Kong propose DeepVision-VLA, a Vision-Language Mixture-of-Transformers framework that injects multi-level visual features into deeper layers and employs Action-Guided Visual Pruning to significantly outperform prior methods in complex robotic manipulation tasks.
Key Contributions
- The paper introduces DeepVision-VLA, a framework built on a Vision-Language Mixture-of-Transformers architecture that injects multi-level visual features from a dedicated vision expert into deeper layers of the VLA backbone to counteract the progressive loss of visual sensitivity during action generation.
- An Action-Guided Visual Pruning strategy is presented to refine information flow by leveraging shallow-layer attention to identify and preserve task-relevant visual tokens while removing irrelevant background data with minimal computational overhead.
- Experimental results demonstrate that the proposed method outperforms prior state-of-the-art approaches by 9.0% on simulated tasks and 7.5% on real-world manipulation benchmarks, validating the effectiveness of enhanced visual grounding in complex robotic control.
Introduction
Vision-Language-Action (VLA) models are critical for robotic manipulation as they translate visual observations and language instructions into precise physical actions. However, prior approaches often treat the underlying Large Language Model backbone as a black box, failing to address a key limitation where the model's sensitivity to task-relevant visual tokens progressively degrades in deeper layers. To solve this, the authors introduce DeepVision-VLA, which leverages a Vision-Language Mixture-of-Transformers framework to inject multi-level visual features from a dedicated vision expert directly into the deeper layers of the VLA backbone. They further enhance this architecture with Action-Guided Visual Pruning, a technique that filters irrelevant visual tokens using shallow-layer attention to ensure only critical cues influence action generation.
Method
The authors build upon the QwenVLA-OFT baseline, which utilizes a visual encoder (SigLIP2-Large) and an LLM backbone (Qwen3-VL) to map observations and instructions to actions. However, standard VLA models often suffer from sensitivity attenuation in deep layers, where visual grounding becomes diffuse and less effective for precise manipulation. To address this, the authors propose the DeepVision-VLA framework, which enhances visual grounding by injecting multi-level knowledge from a Vision Expert into the deep layers of the VLA.
Refer to the framework diagram for a high-level comparison of the vanilla architecture against the proposed DeepVision-VLA. While the vanilla model relies solely on the LLM backbone, the proposed method introduces a Vision Expert branch that processes high-resolution inputs to capture fine-grained spatial details. This design aims to counteract the loss of visual sensitivity in deeper network layers.
The detailed architecture is depicted in the figure below. The model consists of a Vision Expert branch (using DINOv3) and the standard LLM Backbone. The Vision Expert is connected only to the deepest n layers of the VLA, where visual grounding is typically weakest. To integrate these features, the authors employ a Vision-Language Mixture-of-Transformers (VL-MoT) design. Instead of simple concatenation, the intermediate Query, Key, and Value (QKV) representations from the Vision Expert are exposed and integrated with the corresponding QKV of the deep VLA layers via a shared-attention mechanism.
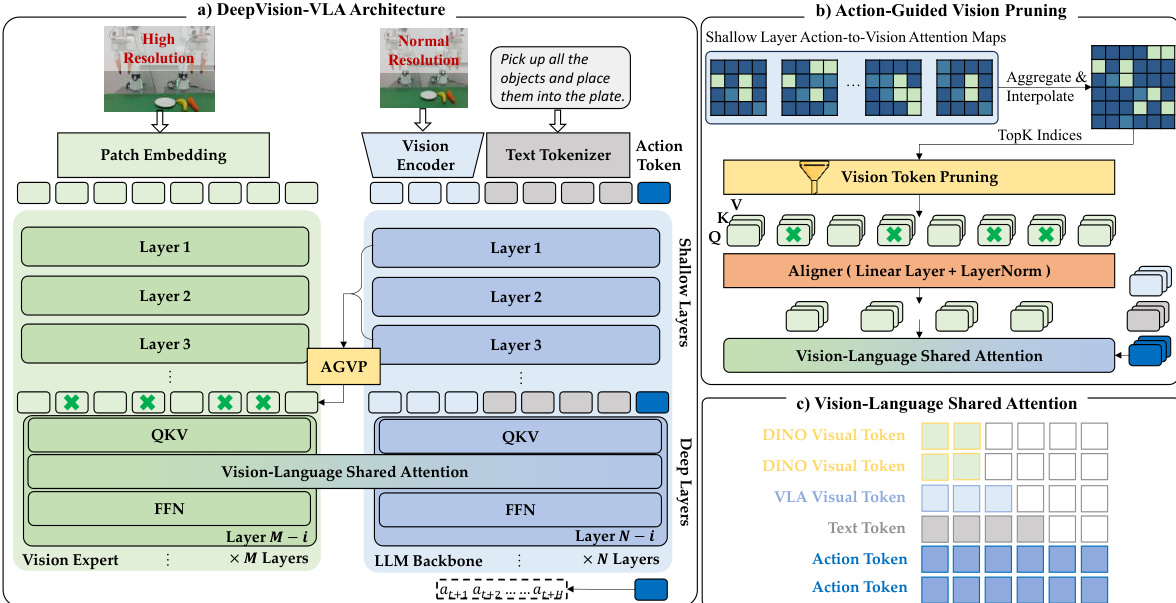
To ensure the model focuses on task-relevant regions, the authors introduce Action-Guided Vision Pruning (AGVP). This strategy leverages attention maps from the shallow layers of the VLA, where visual grounding is most reliable, to identify Regions of Interest (ROIs). These attention cues are aggregated over shallow layers and interpolated to match the Vision Expert's resolution. The model then retains only the top-K most relevant visual tokens, effectively filtering out redundant background features before they are integrated into the deep layers.
The integration of these pruned visual tokens is handled via the Vision-Language Shared Attention mechanism. In this module, the QKV projections from both the Vision Expert and the LLM backbone are concatenated. The attention is computed over this combined set, enabling cross-branch information exchange while preserving separate processing pathways. This allows the deep layers to access high-level, object-centric representations from the Vision Expert, significantly enhancing action prediction precision. The model is trained end-to-end on a large-scale cross-embodiment dataset, and during inference, the pipeline remains fully executable without additional external supervision.
Experiment
- Layer-wise analysis of existing VLA models reveals that while shallow layers effectively ground actions in task-relevant visual regions, deeper layers increasingly rely on diffuse and less relevant features, leading to reduced action reliability.
- Simulation experiments demonstrate that the proposed DeepVision-VLA significantly outperforms multiple baselines across diverse manipulation tasks by integrating a Vision-Language Mixture-of-Transformers framework and an Action-Guided Visual Pruning strategy.
- Ablation studies confirm that coupling a high-resolution Vision Expert with deeper LLM layers and utilizing action-to-vision attention for token pruning are critical for maintaining strong visual grounding and achieving superior performance.
- Real-world evaluations on complex single-arm tasks show that the model achieves high success rates in precise manipulation scenarios, such as writing and pouring, where it maintains stability and accuracy even in multi-stage sequences.
- Generalization tests under unseen backgrounds and varying lighting conditions indicate that the model effectively decouples task-relevant objects from environmental noise and maintains robust performance where baseline methods fail.