Command Palette
Search for a command to run...
Shaoshuai Shi Xiaogang Wang Hongsheng Li
摘要
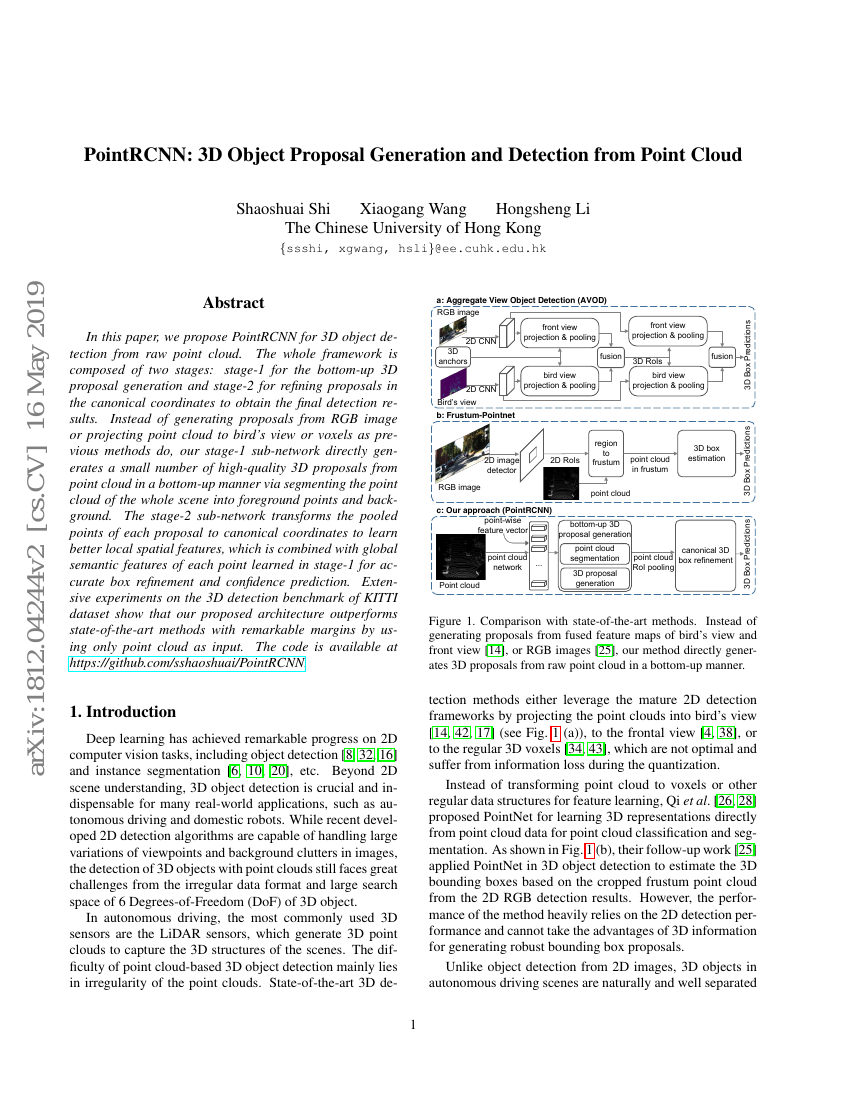
本文提出了一种名为PointRCNN的方法,用于从原始点云中进行三维目标检测。整个框架由两个阶段组成:第一阶段用于自下而上的三维提议生成,第二阶段用于在规范坐标系中精炼提议以获得最终检测结果。与以往方法不同的是,我们的第一阶段子网络通过将整个场景的点云分割为前景点和背景点,直接从点云中自下而上地生成少量高质量的三维提议,而不是从RGB图像生成提议或将点云投影到鸟瞰图或体素。第二阶段子网络将每个提议中的池化点转换到规范坐标系中,以学习更好的局部空间特征,这些特征与第一阶段学习到的每个点的全局语义特征相结合,实现精确的边界框精炼和置信度预测。在KITTI数据集的三维检测基准测试中进行了大量实验,结果显示我们提出的架构仅使用点云作为输入时,在性能上显著优于现有最先进方法。代码可在https://github.com/sshaoshuai/PointRCNN 获取。
代码仓库
sshaoshuai/PointRCNN
官方
pytorch
GitHub 中提及
direcf/pointrcnn_multiclass
pytorch
GitHub 中提及
sshaoshuai/Pointnet2.PyTorch
pytorch
GitHub 中提及
ModelBunker/PointRCNN-PyTorch
pytorch
GitHub 中提及
isl-org/Open3D-ML
pytorch
jskim808/js_pointrcnn
pytorch
GitHub 中提及
cxy1997/3D_adapt_auto_driving
pytorch
GitHub 中提及
KangchengLiu/FAC_Foreground_Aware_Contrast
pytorch
GitHub 中提及
KangchengLiu/RM3D
pytorch
GitHub 中提及
KPeng9510/MASS
pytorch
GitHub 中提及
carterprice2/Deep_Learning_project
GitHub 中提及
sunshenggu/xc_eval_pcdet
pytorch
GitHub 中提及
基准测试
| 基准 | 方法 | 指标 |
|---|---|---|
| 3d-object-detection-on-kitti-cars-easy | PointRCNN | AP: 84.32% |
| 3d-object-detection-on-kitti-cars-hard | PointRCNN | AP: 67.86% |
| 3d-object-detection-on-kitti-cyclists | PointRCNN | AP: 59.60% |
| 3d-object-detection-on-kitti-cyclists-easy | PointRCNN | AP: 73.93% |
| 3d-object-detection-on-kitti-cyclists-hard | PointRCNN | AP: 53.59% |
| object-detection-on-kitti-cars-easy | PointRCNN Shi et al. (2019) | AP: 85.94 |
| object-detection-on-kitti-cars-hard | PointRCNN Shi et al. (2019) | AP: 68.32 |
| object-detection-on-kitti-cars-moderate | PointRCNN Shi et al. (2019) | AP: 75.76 |
| robust-3d-object-detection-on-kitti-c | PointRCNN | mean Corruption Error (mCE): 91.88% |